S.S Chopade et al. Int. Journal of Engineering Research and Applications (IJERA) www.ijera.com
Vol. 3, Issue 5, Sep-Oct 2013, pp.247-251
www.ijera.com 247 | P a g e
Robotics in Medicine Applications
Shripad Shashikant Chopade¹, Sagar Pradip Kauthalkar², Chaitanya
Bhalchandra Bhandari³
Shripad Shashikant Chopade, M Tech (Machine Design & Robotics), Research Scholar, India
Sagar Pradip Kauthalkar, M Tech (Machine Design & Robotics), Research Scholar, India
Chaitanya Bhalchandra Bhandari, Research Scholar, India
Abstract
Robotics for medical applications started fifteen years ago while for biological applications it is rather new
(about five years old). Robotic surgery can accomplish what doctors cannot because of precision and
repeatability of robotic systems. Besides, robots are able to operate in a contained space inside the human body.
All these make robots especially suitable for non-invasive or minimally invasive surgery and for better
outcomes of surgery. Today, robots have been demonstrated or routinely used for heart, brain, and spinal cord,
throat, and knee surgeries at many hospitals in the United States (International Journal of Emerging Medical
Technologies, 2005).
Robots in medicine deserve enhanced attention, being a field where their instrumental ids enable
exacting options. The availability of oriented effectors, capable to get into the human body with no or negligible
impact, is challenge, evolving while micro-mechanics aims at nanotechnology. The survey addresses sets of
known achievements, singling out noteworthy autonomous in body devices, either co-robotic surgical aids, in
view of recognizing shared benefits or hindrances, to explore how to conceive effective tools, tailored to answer
given demands, while remaining within established technologies.
Nanorobotics is the still largely hypothetical technology of creating machines or robots at or close to
the scale of a nanometer (10
-9
meters). Also known as nanobots or nanites, they would be constructed from
nanoscale or molecular components. So far, researchers have only been able to produce some parts of such a
machine, such as bearings, sensors, and synthetic molecular motors, but they hope to be able to create entire
robots as small as viruses or bacteria, which could perform tasks on a tiny scale. Possible applications include
micro surgery (on the level of individual cells), utility fog, manufacturing, weaponry and cleaning. This
presentation provides a survey of current developments, in the spirit of focusing the trends toward the said turn.
Keywords :Bearings, Robot Machinery, Sensors, Synthetic molecular motors, Telesurgery techniques.
I. Introduction
Robotics is a field that has many exciting
potential applications. It is also a field in which
expectations of the public often do not match current
realities. Truly incredible capabilities are being sought
and demonstrated in research laboratories around the
world. However, it is very difficult to build a
mechanical device (e.g. a robotic arm) that has
dexterity comparable to a human‟s limbs. It is even
more difficult to build a computer system that can
perceive its environment, reason about the
environment and the task at hand, and control a robotic
arm with anything remotely approaching the
capabilities of a human being.
II. History of robotics
The word robot (from the Czech word robota
meaning compulsory labor) was defined by the
Robotic Institute of America as “a machine in the form
of a human being that performs the mechanical
functions of a human being but lacks sensitivity.” One
of the first robots developed was by Leonardo da
Vinci in 1495; a mechanical armored knight that was
used to amuse royalty. This was then followed by
creation of the first operational robot by Joseph Marie
Jacquard in 1801, in which an automated loom,
controlled by punch cards, created a reproducible
pattern woven into cloth. Issac Asimov further
elucidated the role of robotics in 1940 through short
stories; however, it was his three laws of robotics that
received popular acclaim. The three laws states are,
1) A robot may not injure a human being, or through
inaction allow a human being to come to harm
2) A robot must obey the orders given it by human
beings except where such orders would conflict with
First Law.
3) A robot must protect its own existence as long as
such protection does not conflict with the First or
Second Law.
RESEARCH ARTICLE OPEN ACCESS
S.S Chopade et al. Int. Journal of Engineering Research and Applications (IJERA) www.ijera.com
Vol. 3, Issue 5, Sep-Oct 2013, pp.247-251
www.ijera.com 248 | P a g e
III. Applications in Medicine
Robots are filling an increasingly important
role of enhancing patient safety in the hurried pace of
clinics and hospitals where attention to details and
where reliability are essential. In recent years, robots
are moving closer to patient care, compared with their
previous role as providing services in the
infrastructure of medicine. Examples of past use are in
repetitive activities of cleaning floors and washing
equipment and carrying hot meals to patients‟ bedside.
What is new is finding them in clinical laboratories
identifying and measuring blood and other specimen
for testing, and in pharmacies counting pills and
delivering them to nurses on „med-surg-units‟ or
ICU‟s. Or bringing banked blood from the laboratory
to the ED, surgery or ICU for transfusions. Robots are
being used as very accurate „go-fors‟!
An early active robot, „Robodoc‟ was designed to mill
perfectly round lumens in the shafts of fractured
bones, to improve the bonding of metal replacements
such as for femur heads and knee joints. The future of
this system remains uncertain because of questions
about the ultimate beneficial outcomes.
The reasons behind the interest in the
adoption of medical robots are multitudinous. Robots
provide industry with something that is, to them, more
valuable than even the most dedicated and hard-
working employee - namely speed, accuracy,
repeatability, reliability and cost-efficiency. A robotic
aid, for example, one that holds a viewing instrument
for a surgeon, will not become fatigued, for however
long it is used. It will position the instrument
accurately with no tremor and it will be able to
perform just as well on the 100
th
occasion as it did
on the first.
IV. Robotic surgery
Robotic surgery is the process whereby a robot
actually carries out a surgical procedure under the
control of nothing other than its computer program.
Although a surgeon almost certainly will be involved
in the planning of the procedure to be performed and
will also observe the implementation of that plan, the
execution of the plan will not be accomplished by
them - but by the robot.
In order to look at the different issues involved in the
robotic fulfillment of an operation, the separate
sections of a typical robotic surgery (although robotic
surgery is far from typical) are explained below.
Surgical planning
Surgical planning consists of three main
parts. These are imaging the patient, creating a
satisfactory three-dimensional (3D) model of the
imaging data, and planning/rehearsing the operation.
The imaging of the patient may be accomplished via
various means. The main method is that of computer
tomography (CT). CT is the process whereby a stack
Of cross-sectional views of the patient are taken using
magnetic-resonance-imaging or x-ray methods. This
kind of imaging is necessary for all types of operative
procedure and, as such, does not differ from traditional
surgical techniques.
Fig 1: A patient having a brain scan
This two-dimensional (2D) data must then be
converted into a 3D model of the patient (or, more
usually, of the area of interest). The reasons for this
transformation are twofold. Firstly, the 2D data, by its
very nature, is lacking in information. The patient is,
obviously, a 3D object and as such, occupies a spatial
volume. Secondly, it is more accurate and intuitive for
a surgeon, when planning a procedure, to view the
data in the form that it actually exists. It should be
noted, however, that the speed of said hardware is
increasing all the time and the price will decrease too,
as the technology involved becomes more
commonplace. This means that the process will be
more cost-efficient and increasingly routine in the
future.
The third phase of the planning is the actual
development of the plan itself. This involves
determining the movements and forces of the robot in
a process called „path planning‟ - literally planning the
paths that the robot will follow.
Fig 2: A surgery simulation to aid planning
S.S Chopade et al. Int. Journal of Engineering Research and Applications (IJERA) www.ijera.com
Vol. 3, Issue 5, Sep-Oct 2013, pp.247-251
www.ijera.com 249 | P a g e
It is here that the 3D patient model comes
into play, as it is where all the measurements and paths
are taken from. This emphasizes the importance of the
accuracy of the model, as any errors will be interpreted
as absolute fact by the surgeons (and hence the robot)
in their determination of the plan.
.
V. Registration of robot to patient
The registration of the robot and the patient is the
correlation of the robot‟s data about the patient with
the actual patient, in terms of positioning. There are
two important stages in the registration procedure -
fixation of the patient and the robot, and intra-surgical
registration itself. Fixation is an essential ingredient
of a successful robotic operation. Robots act upon pre-
programmed paths , these programs are much more
complex if they must take into account the fact that
the patient‟s position may be different to the inputted
data and, in fact, continually changing. For this reason
it is imperative that the robot can act in, at least, a
semi-ordered environment.
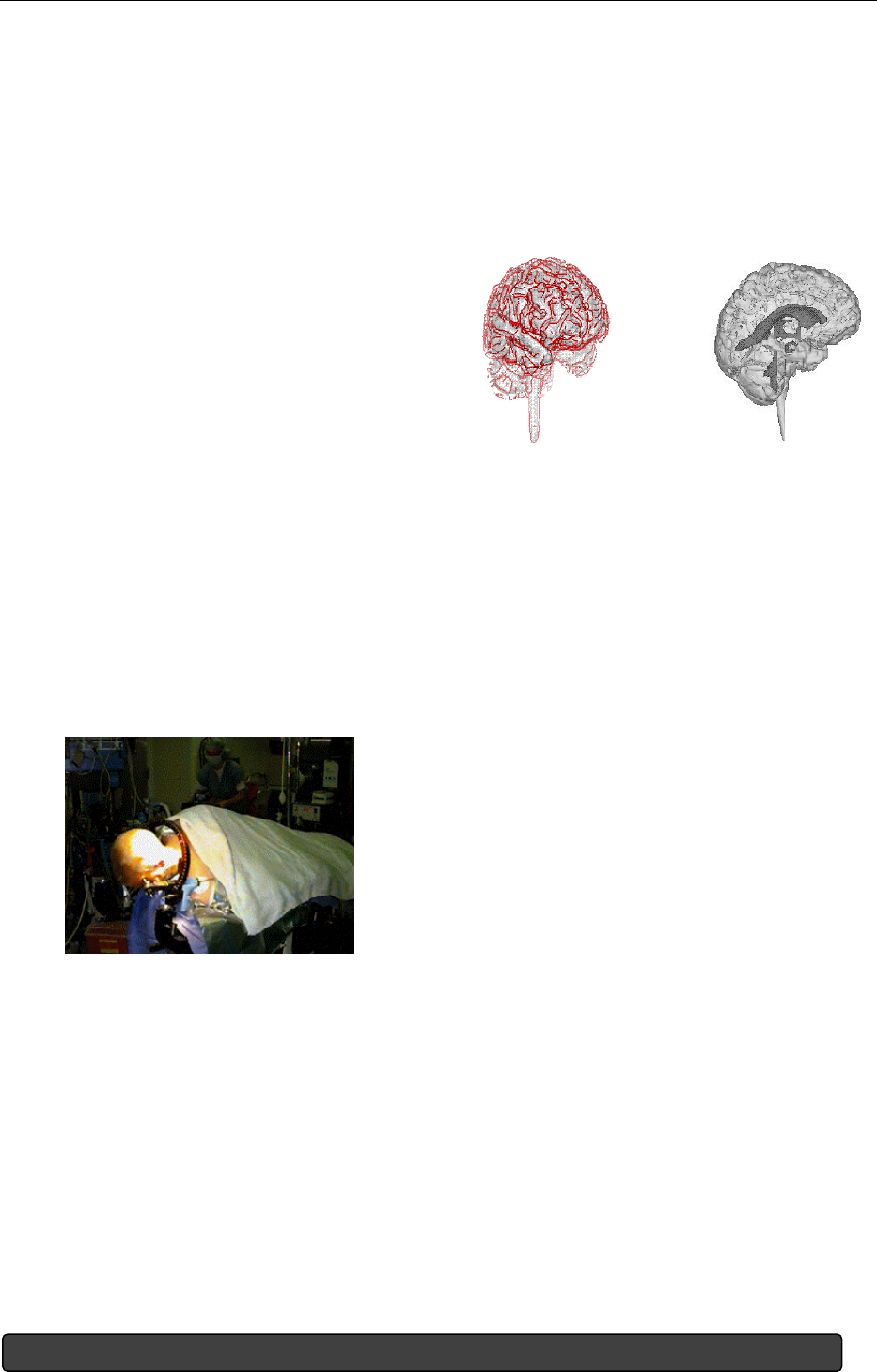
Fixation of the patient that is fixing the
patient in position (i.e. on the operating table), is
achieved through strapping and clamping of the areas
pertinent to the surgery. This is common in traditional
surgery, too. For example, the head is fixed in position
during neurosurgery through the application of a head-
fixation device known as a „stereo tactic unit‟.
Fixation of the robot is achieved through analogous
methods.
Fig 3: Patient held in fixed position for neurosurgery
The intra-surgical registration itself is the
process of establishing a common reference frame
between the pre-surgical data (3D model and
associated surgical plan) and the corresponding patient
anatomy. There are two primary techniques of
achieving this common frame of reference.
The first, and most usual, method is to attach
fiducial to the underlying patient structures pre-
operatively. These fiducial are then sensed, and
compared to the pre-operative data, to precisely align
the two data sets. Furthermore, these fiducial are
invasive and cause added trauma to the patient in sites
physically far from the primary field of surgical focus.
The alternative to fiducially-based registration is that
of „surface- based‟ registration. This technique uses
surfaces that are intrinsic to the data itself. The benefit
of this method is that it does not require the use of
expensive and traumatically invasive markers. The
illustration of the implementation of this concept is
shown below. On the Left (a) is a brain with extracted
curves shown in red. On the right (b) is the final 3D
model gained from these curves:
(a) Extracted curves (red) (b) Model produced from curves
Fig 4: Curves
The success of surface-registration is highly
dependent upon the realism and accuracy of the 3D
models gained pre-operatively and upon the sensing
accuracy of intra-surgical data acquisition. Geometric
surface model validation is complicated since errors
can be introduced at several stages of model creation:
during imaging, „segmentation‟ and surface creation.
Prior to the emergence of surface-based techniques for
surgery, 3D modeling medical data has been primarily
used as a teaching aid in the study of anatomy (e.g.
VOXEL-MAN). These models have very different
accuracy requirements to those used for surface-based
registration.
VI. Execution of robotic procedure
Once all of the preparation is complete, it is
time to pass control to the robot for the actual
implementation of the surgery. The robots used for
automated surgery tend, at the present time, to be
adapted industrial robots; for example, the PUMA
robot arm having brought up the fact that the surgeon
is reliant upon the engineering behind the tools that
they are using, it is clear that companies would not
wish to risk possible legal proceedings should one of
their products fail. Once the robotic procedure is
initiated, sensors collect real-time data from the
operating site and pass this to a display, via which the
surgeon observes the operation.
S.S Chopade et al. Int. Journal of Engineering Research and Applications (IJERA) www.ijera.com
Vol. 3, Issue 5, Sep-Oct 2013, pp.247-251
www.ijera.com 250 | P a g e
Fig 5: The operating theatre in a robotic surgery
VII. Robots in Telesurgery
While, in robotic surgery, the robot is given
some initial data information and allowed to proceed
on its own, there are some other applications of
robotics in surgery where the robot is actually guided
by a human throughout the process. The actions of the
robot are not predetermined, but rather controlled in
real-time by the surgeon. The remote location can be
as far away as the other side of the world, or as near as
the next room. Since there is distance separating the
surgeon and the patient, it is evident that the surgeon
cannot operate using his own hands. A robot, local to
the patient, becomes the surgeon‟s hands, while an
intricate interface conveys the robot‟s senses to the
surgeon (making use of while an intricate interface
conveys the robot‟s senses to the surgeon (making use
of visual, aural, force and tactile feedback).
Fig 6: Surgeon in Telesurgery console
In the sense that the robot is the one
performing the surgery, telesurgery is a part of robotic
surgery. Furthermore, as in robotic surgery, the patient
is usually imaged before the operation starts and the
information sent to the surgeon. In telesurgery the
surgeon cannot rely on anything but the sensor data,
which is transmitted from the remote location. The
sensor data, therefore, must be absolutely correct. For
this purpose, a host of different schemes are used.
Telesurgery is mainly used as a form of
minimally invasive surgery. In traditional surgery, the
physical hand size has always been a limiting factor
when it comes to delicate surgery in hard-to-reach
places. Since the robot can theoretically be as small as
is desired, it can enter through a small opening,
navigate through the body and finally reach and
operate in places that would otherwise be inaccessible
without a large incision made specifically to facilitate
entry. Recent experiments even involve the robot
being inserted through a small puncture in the thigh
and guided all the way to the brain through blood
vessels as narrow as 1.5mm in diameter.
Fig 7: Endoscopy using telesurgery techniques
Over the next ten years, breakthroughs in
nanotechnology may help us build better and
smaller machines.
A nanometer is just one-millionth of a
millimetre in length and nanotechnology involves
studying and working with materials on an ultra-small
scale. Using nanotechnology, scientists have created
tiny walking nanobot, using only the building blocks
of life: DNA.
Fig 8: DNA
The microscopic walker, which is only 10
nanometers long, uses its legs to move along a
footpath. Nanotechnology could also lead to a range

S.S Chopade et al. Int. Journal of Engineering Research and Applications (IJERA) www.ijera.com
Vol. 3, Issue 5, Sep-Oct 2013, pp.247-251
www.ijera.com 251 | P a g e
of materials with new qualities such as stay-clean glass
and magnetic liquids. There may also be
breakthroughs from scientists trying to implant
computer programs into living creatures - known as
wetware. This technology could help people with
false arms or legs to move them just by thinking about
it.
VIII. Conclusions
Medical robotics, and particularly
autonomous surgical robotics, is still in an embryonic
stage. To conclude, there are several steps that must be
taken in order to further the use and development of
robots in surgery (and in medicine in general). These
are:
The development and international adoption,
of safety standards the aim of task-specific, as opposed
to general-purpose, robots the education of the medical
community in the acceptance and integration of
Robots.
The economic and social advantages to be
gained from the mass-use of robotics in medicine (and
particularly surgery), as already expounded, are
enormous. If all of the above steps are taken, then the
full potential of robotics can be exploited in the
medical sector, as it has been in industrial applications,
for the improved welfare of society everywhere.
References
[1] “Telepresence surger‟‟, SRI Center for
Medical Technology “Medical Robotics‟‟,
Lara Crawford, Robotics Lab, University of
Berkeley, California
[2] "An experimental telesurgery robot", G.C.
Thorne, M. Halliwell, P.N.T. Wells, IEE
Colloquium on 'Towards Telesurgery', No.
1995/137, pp. 4/1-4 “The Karlsruhe
Endoscopic Surgery Trainer‟‟,
Forschungszentrum Karlsruhe Technik und
Umwelt.
[3] "A Robot with Improved Absolute
Positioning Accuracy for CT Guided
Stereotactic Brain Surgery", Y.S.Kwoh,
J.Hou, E.A. Jonckheere, S.Hayati, IEEE
Transactions on Biomedical Engineering,
Vol.35, Feb.1988, pp.153-60 "3D image
reconstruction and its application to surgery
automation"
[4] C.H.Cheng, W.H.Yeng, M.C.Tsai,
H.B.Hsieh, Proceedings of the Third
International Conference on Systems
Integration, Aug.1994, pp.967-73 "Safety
Critical Problems In Medical Systems", Brian
Davies, Proceedings of the Second Safety-
Critical Systems Symposium, pp. 55-68
[5] "Robotics in Medicine", P.Dario,
E.Guglielmelli, B.Allotta, IROS '94.
Proceedings of the IEEE/RSJ/GI International
Conference on Intelligent Robots and
Systems. Advanced Robotic Systems and the
Real World (Cat.No.94CH3447-0),
Sept.1994, Vol.2, pp.739-52
